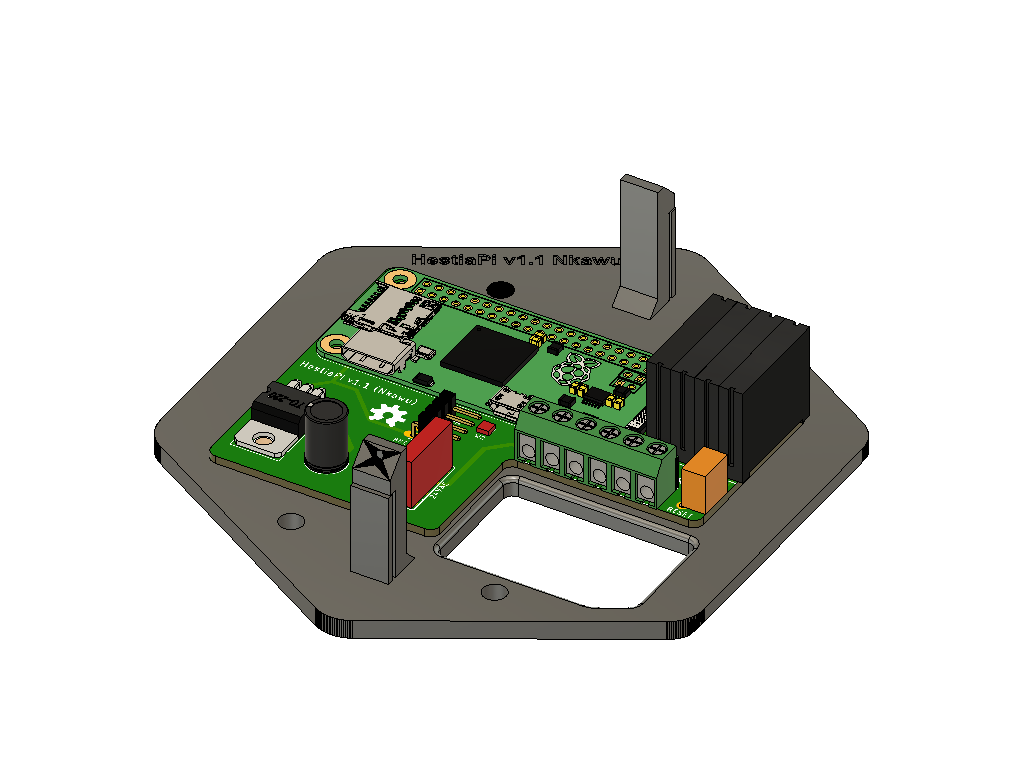
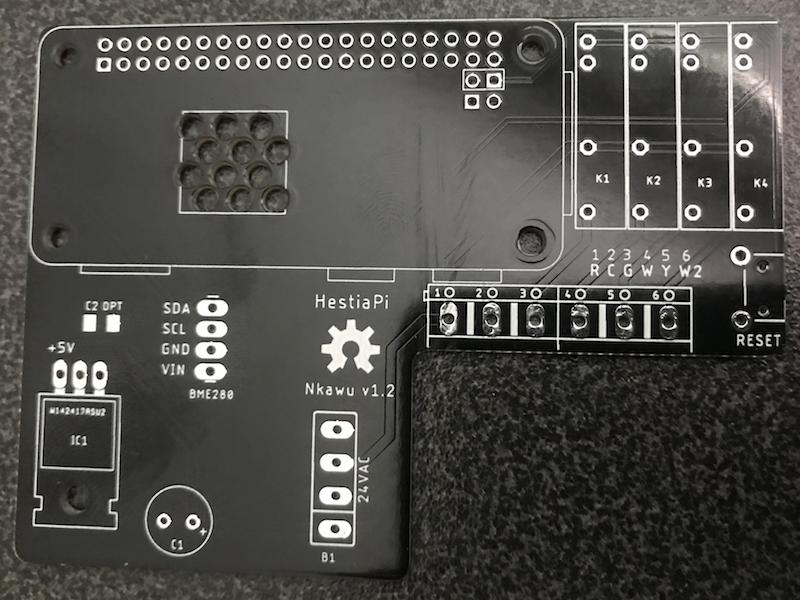
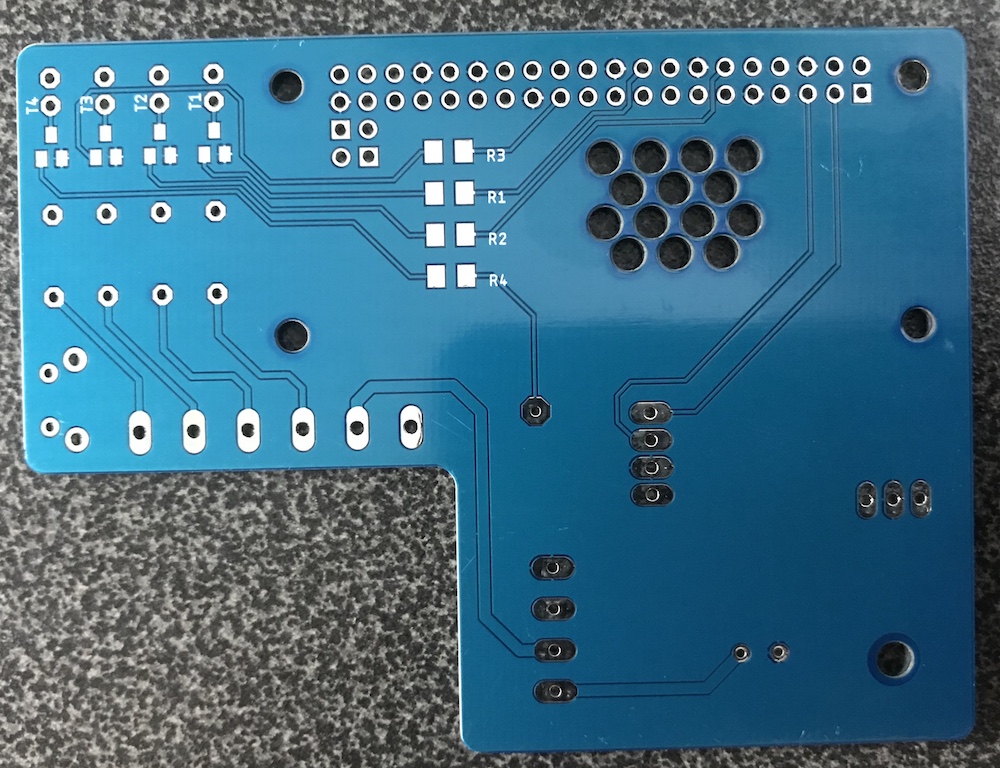
Like @jay I went down a similar path. Designed the PCB to fit in the latest case, US type with 24VAC power, 6 wires R/C/G/W/Y/W2 & 4 relays for W/Y/G/W2. I added a pad as I wasn’t sure which pin W2 should connect to on the RPi, so it’ll have to be jumpered. I don’t plan to use it though.
Just received the boards, still waiting for some components.
Power supply is a simple bridge rectifier with smoothing cap for 24VAC → 24VDC, feeding a LM2596 based LM7805 drop-in replacement 5V voltage regulator to keep the heat down. I’ll build up the power supply circuit first then test it. Next I’ll build & test each relay circuit individually. Raspberry Pi will get added last. I put the connector for the BME280 where I can use a right angle connector to keep overall height low. I’m also powering the BME280 module from the 5V regulator as it has it’s on 3.3V reg.
I’m an electronics hobbyist, a good percentage of the PCBs I design function - hopefully no magic smoke gets released with this one.
Guys, you make the open source community proud WELL DONE!
Make sure you publish it somewhere when its done. Avoid simply uploading a zip here but prefer github or something. I can create the repo for you if you are not into that.
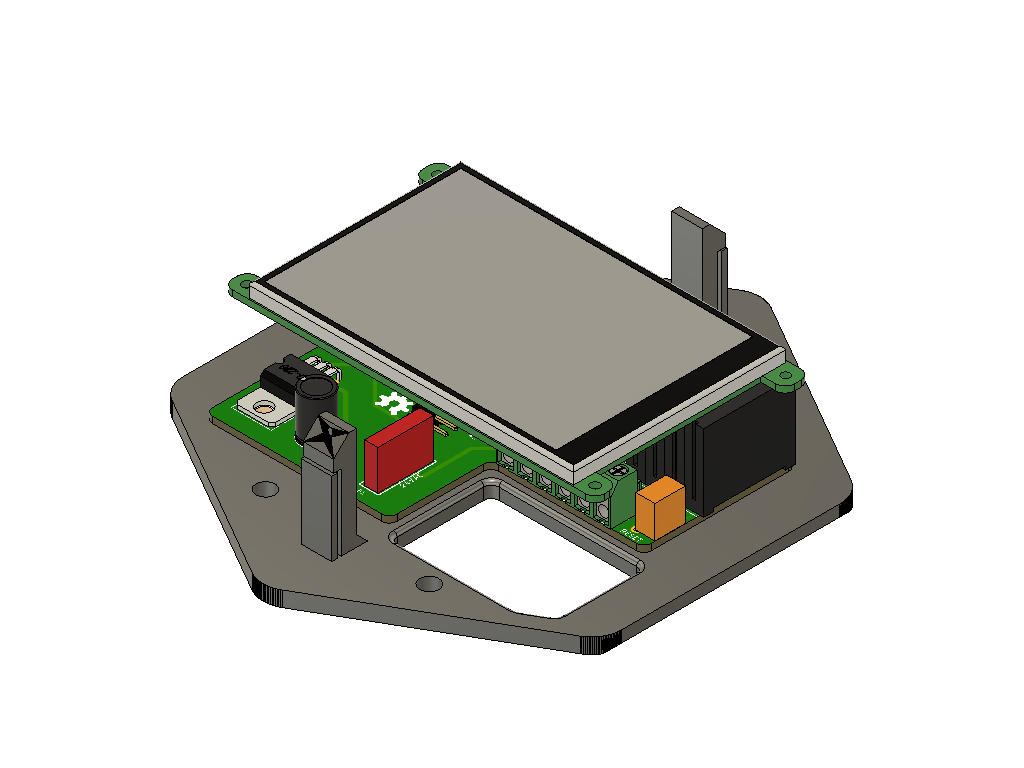
Unfortunately the height is determined by the relays. Using different relays (less common though for people and harder to find) or moving them outside the LCD footprint (larger case, different design file) will help you making it more low-profile.
By the way, one of the reset pins that go to the button is actually the ground so you can skip one of the tracks. Check with a multimeter and update your design for future reference.
Keep us posted!
Thank you for the compliments! I use Github, will definitely make all design files available in there once I have it tested. Good point on the reset ground pin - never occurred to me!
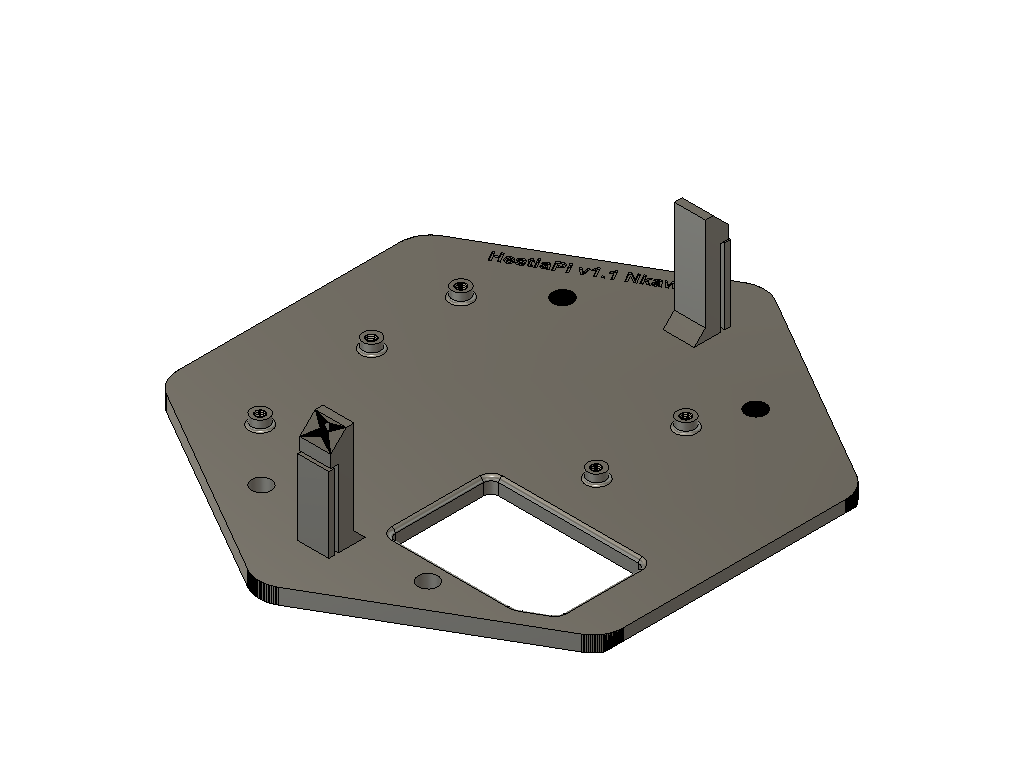
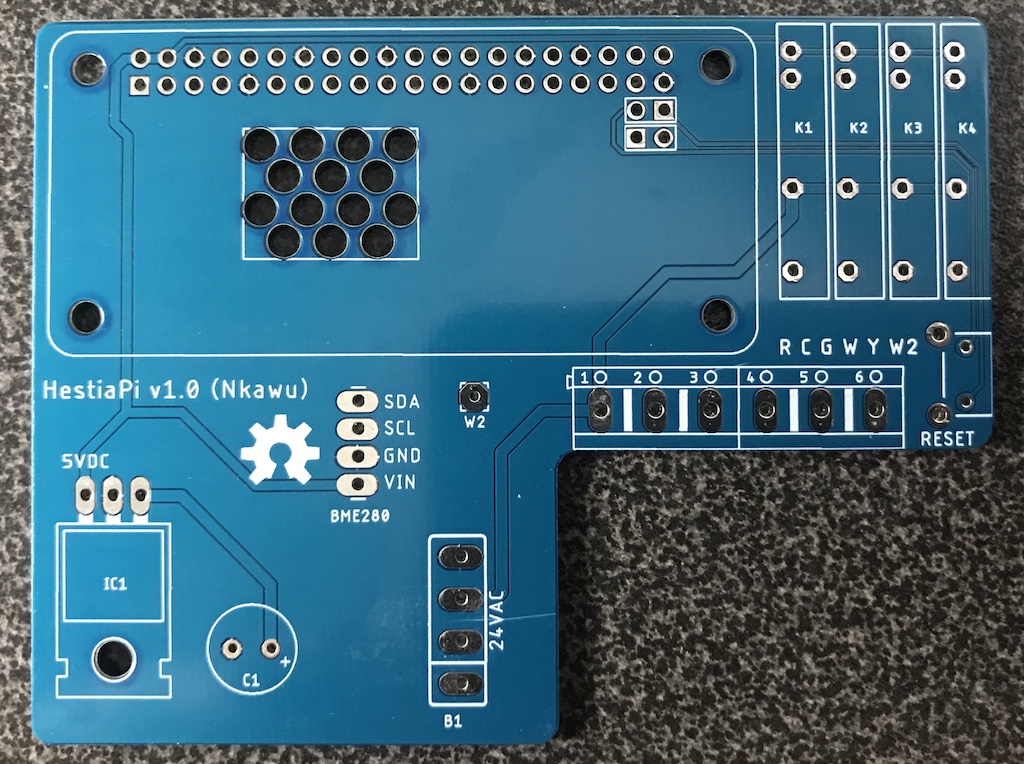
Changed the wall plate to fit the PCB I made while I’m waiting for components. I have been using Eagle CAD for many years, I’ve tried KiCAD but I’m so much more productive in Eagle. The integration between Eagle & Fusion 360 is cool to play with! BTW @HestiaPi, what GPIO pin should I connect the W2 line to for future use?
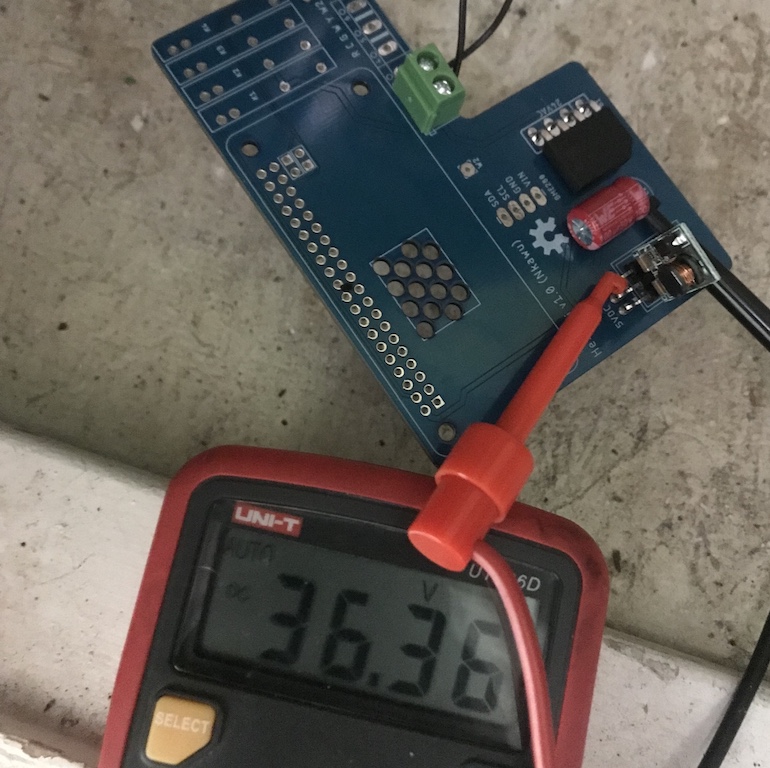
Components are slowly arriving. Using a DD4012SA switching 5V regulator. The main chip is a ME3116 from Nanjing Microsystems, rated to input voltage of 45V and the module to 40V, enough headroom over the rectified 24VAC. Hard to find a 5V regulator that can handle up to 40V.
BTW, I had to make changes to the PCB (of course). The library I used for the relays had the incorrect size, so they didn’t fit next to each other. Grrrr! Decided to make a few more improvements also, like allowing for an optional low ESR capacitor after the 5V regulator and connecting the W2 line to the RPi GPIO pins.
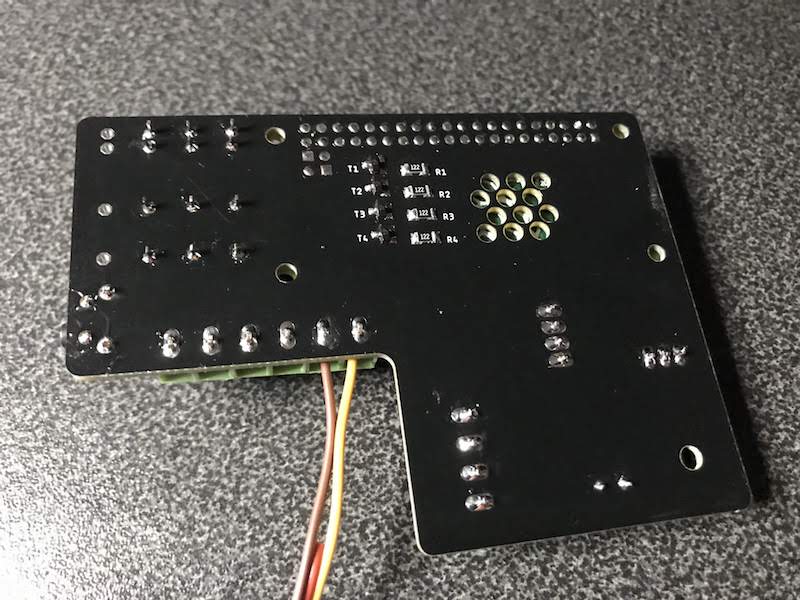
Tomorrow I’ll test if the relays are switching as I noticed when I mounted them the component I was using in Eagle CAD had the polarities of pins 3 & 4 reversed. So frustrating! I may just mod the PCB as desoldering the Rasbperry Pi is a huge pain.
Looks like the OMRON relays have reverse polarity protection, so the relays still work fine. I decided to patch the PCB as I don’t want to wait a few weeks for a new board. Fairly simple fix, so I cut the wrong traces on the PCB and soldered in a few jumper wires to correct the polarity. Unfortunately had to desolder the 3 relays to cut the 5V tracks.
I connected the HestiaPi to the system temporarily to test but it turns the fan on, even though the GPIO is off. Have to debug that next.
And it’s finally alive! The fan relay’s GND pin was shorted to ground, so it was always on. The gpio command is pre-installed on the hestia-pi-touch images, very useful to turn individual GPIO pins on and off to test functionality. For example to turn on the fan:
gpio -g write 18 1
and to turn it off again
gpio -g write 18 0
I will upload my PCB & modified case designs as well as the BOM to GitHub soon now that I have everything working
 WELL DONE!
WELL DONE!